G2solve3arc Class Reference
|
Clothoids
|
#include <ClothoidList.hxx>
Friends | |
| ostream_type & | operator<< (ostream_type &stream, ClothoidCurve const &c) |
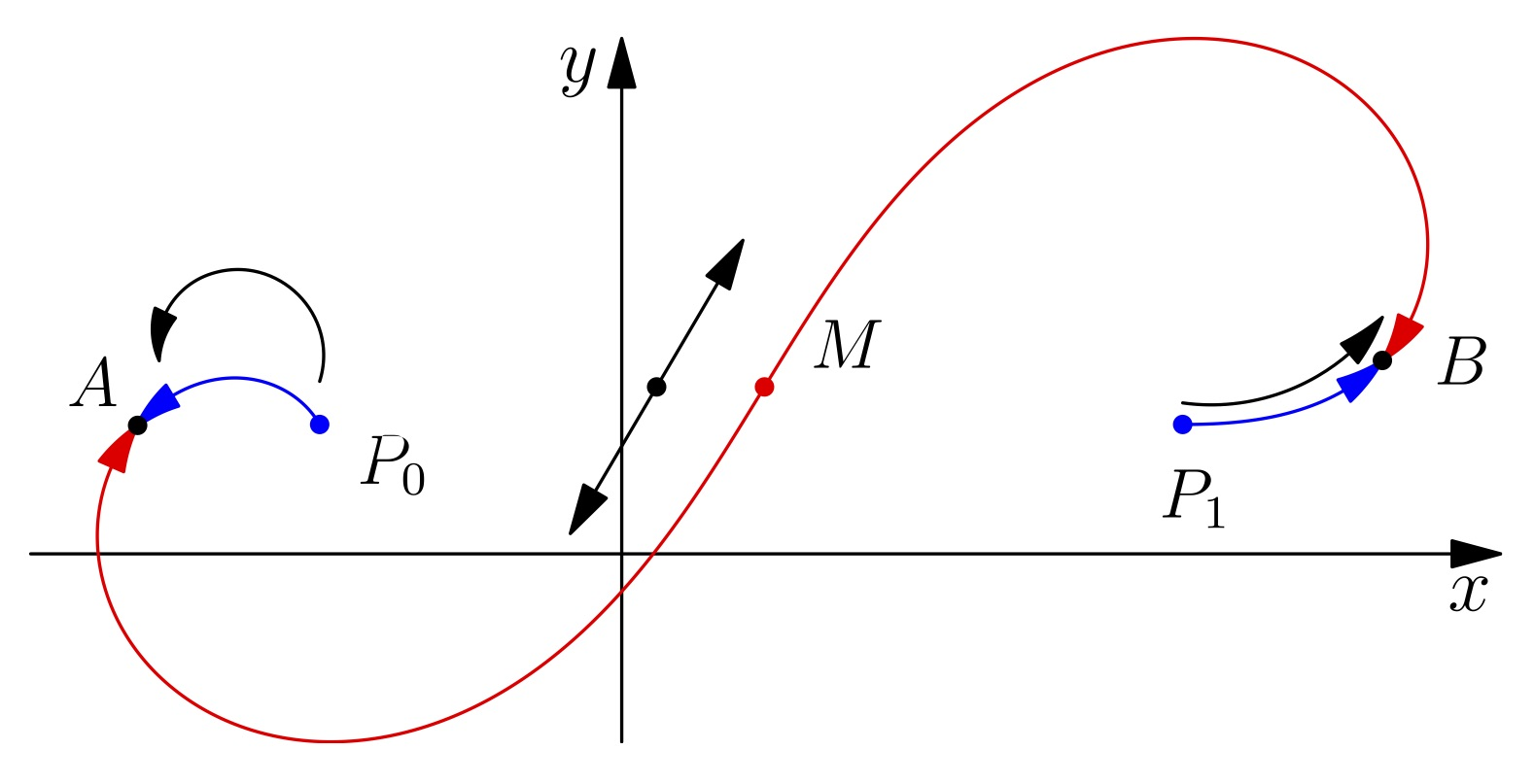
Detailed Description
Construct a piecewise clothoids \( G(s) \) composed by 3 clothoid and one line segment that solve the \( G^2 \) problem
match
\[ \begin{array}{ll} \textrm{endpoints:}\quad& \left\{ \begin{array}{r@{~}c@{~}l} G(0) &=& \mathbf{p}_0 \\[0.5em] G(L) &=& \mathbf{p}_1 \end{array} \right. \\[1em] \textrm{angles:}\quad& \left\{ \begin{array}{r@{~}c@{~}l} \theta(0) &=& \theta_0 \\[0.5em] \theta(L) &=& \theta_1 \end{array} \right. \\[1em] \textrm{curvature:}\quad& \left\{ \begin{array}{r@{~}c@{~}l} \kappa(0) &=& \kappa_0 \\[0.5em] \kappa(L) &=& \kappa_1 \end{array} \right. \end{array} \]
Reference
The solution algorithm is described in
- E.Bertolazzi, M.Frego, On the \( G^2 \) Hermite Interpolation Problem with clothoids Journal of Computational and Applied Mathematics, vol 341, pp. 99-116, 2018
Member Function Documentation
◆ build()
| int G2lib::G2solve3arc::build | ( | real_type | x0, |
| real_type | y0, | ||
| real_type | theta0, | ||
| real_type | kappa0, | ||
| real_type | x1, | ||
| real_type | y1, | ||
| real_type | theta1, | ||
| real_type | kappa1, | ||
| real_type | Dmax = 0, | ||
| real_type | dmax = 0 ) |
Compute the 3 arc clothoid spline that fit the data
- Parameters
-
[in] x0 initial xposition[in] y0 initial yposition[in] theta0 initial angle [in] kappa0 initial curvature [in] x1 final xposition[in] y1 final yposition[in] theta1 final angle [in] kappa1 final curvature [in] Dmax rough desidered maximum angle variation, if 0 computed automatically [in] dmax rough desidered maximum angle divergence from guess, if 0 computed automatically
- Returns
- number of iteration, -1 if fails
◆ build_fixed_length()
| int G2lib::G2solve3arc::build_fixed_length | ( | real_type | s0, |
| real_type | x0, | ||
| real_type | y0, | ||
| real_type | theta0, | ||
| real_type | kappa0, | ||
| real_type | s1, | ||
| real_type | x1, | ||
| real_type | y1, | ||
| real_type | theta1, | ||
| real_type | kappa1 ) |
Compute the 3 arc clothoid spline that fit the data
- Parameters
-
[in] s0 length of the first segment [in] x0 initial xposition[in] y0 initial yposition[in] theta0 initial angle [in] kappa0 initial curvature [in] s1 length of the last segment [in] x1 final xposition[in] y1 final yposition[in] theta1 final angle [in] kappa1 final curvature
- Returns
- number of iteration, -1 if fails
◆ curvature_min_max()
- Parameters
-
[out] kMin minimum curvature in the 3 arc \( G^2 \) fitting curve [out] kMax maximum curvature in the 3 arc \( G^2 \) fitting curve
- Returns
- the difference of
kMaxandkMin
◆ curvature_total_variation()
|
inline |
- Returns
- get the total curvature variation of the 3 arc \( G^2 \) fitting
◆ delta_theta()
|
inline |
Return the difference of maximum-minimum angle in the 3 arc \( G^2 \) fitting curve
◆ eval() [1/2]
| void G2lib::G2solve3arc::eval | ( | real_type | s, |
| real_type & | theta, | ||
| real_type & | kappa, | ||
| real_type & | x, | ||
| real_type & | y ) const |
Compute parameters of 3 arc clothoid at curvilinear coordinate \(s\)
- Parameters
-
[in] s curvilinear coordinate of where curve is computed [out] theta the curve angle [out] kappa the curve curvature [out] x the curve \(x\)-coordinate [out] y the curve \(y\)-coordinate
◆ eval() [2/2]
x and \(y\)-coordinate at curvilinear coordinate \(s\)
◆ eval_D()
x and \(y\)-coordinate derivative at curvilinear coordinate \(s\)
◆ eval_DD()
x and \(y\)-coordinate second derivative at curvilinear coordinate \(s\)
◆ eval_DDD()
x and \(y\)-coordinate third derivative at curvilinear coordinate \(s\)
◆ eval_ISO()
| void G2lib::G2solve3arc::eval_ISO | ( | real_type | s, |
| real_type | offs, | ||
| real_type & | x, | ||
| real_type & | y ) const |
x and \(y\)-coordinate at curvilinear coordinate \(s\) with offset
◆ eval_ISO_D()
| void G2lib::G2solve3arc::eval_ISO_D | ( | real_type | s, |
| real_type | offs, | ||
| real_type & | x_D, | ||
| real_type & | y_D ) const |
x and \(y\)-coordinate derivative at curvilinear coordinate \(s\) with offset
◆ eval_ISO_DD()
| void G2lib::G2solve3arc::eval_ISO_DD | ( | real_type | s, |
| real_type | offs, | ||
| real_type & | x_DD, | ||
| real_type & | y_DD ) const |
x and \(y\)-coordinate second derivative at curvilinear coordinate \(s\) with offset
◆ eval_ISO_DDD()
| void G2lib::G2solve3arc::eval_ISO_DDD | ( | real_type | s, |
| real_type | offs, | ||
| real_type & | x_DDD, | ||
| real_type & | y_DDD ) const |
x and \(y\)-coordinate third derivative at curvilinear coordinate \(s\) with offset
◆ integral_curvature2()
|
inline |
- Returns
- get the integral of the curvature squared of the 3 arc \( G^2 \) fitting
◆ integral_jerk2()
|
inline |
- Returns
- get the integral of the jerk squared of the 3 arc \( G^2 \) fitting
◆ integral_snap2()
|
inline |
- Returns
- get the integral of the snap squared of the 3 arc \( G^2 \) fitting
◆ kappa_begin()
|
inline |
Return initial curvature of the 3 arc clothoid
◆ kappa_end()
|
inline |
Return final curvature of the 3 arc clothoid
◆ reverse()
|
inline |
Reverse curve parameterization
◆ rotate()
Rotate curve by angle \( \theta \) centered at point \( (c_x,c_y) \)
- Parameters
-
[in] angle angle \( \theta \) [in] cx \( c_x \) [in] cy \( c_y \)
◆ S0()
|
inline |
- Returns
- get the first clothoid for the 3 arc \( G^2 \) fitting
◆ S1()
|
inline |
- Returns
- get the last clothoid for the 3 arc \( G^2 \) fitting
◆ set_max_iter()
| void G2lib::G2solve3arc::set_max_iter | ( | integer | miter | ) |
Fix maximum number of iteration for the \( G^2 \) problem
◆ set_tolerance()
| void G2lib::G2solve3arc::set_tolerance | ( | real_type | tol | ) |
Fix tolerance for the \( G^2 \) problem
◆ SM()
|
inline |
- Returns
- get the middle clothoid for the 3 arc \( G^2 \) fitting
◆ theta()
Return angle as a function of curvilinear coordinate
◆ theta_begin()
|
inline |
Return initial angle of the 3 arc clothoid
◆ theta_D()
Return angle derivative (curvature) as a function of curvilinear coordinate
◆ theta_DD()
Return angle second derivative (curvature derivative) as a function of curvilinear coordinate
◆ theta_DDD()
Return angle third derivative as a function of curvilinear coordinate
◆ theta_end()
|
inline |
Return final angle of the 3 arc clothoid
◆ theta_min_max()
- Parameters
-
[out] thMin minimum angle in the 3 arc \( G^2 \) fitting curve [out] thMax maximum angle in the 3 arc \( G^2 \) fitting curve
- Returns
- the difference of
thMaxandthMin
◆ theta_total_variation()
|
inline |
- Returns
- get the total angle variation of the 3 arc \( G^2 \) fitting
◆ total_length()
|
inline |
- Returns
- get the length of the 3 arc \( G^2 \) fitting
◆ translate()
Translate curve by \( (t_x,t_y) \)
◆ X()
Return \(x\)-coordinate of the arc clothoid as a function of curvilinear coordinate
◆ x_begin()
|
inline |
Return initial \(x\)-coordinate of the 3 arc clothoid
◆ x_end()
|
inline |
Return final \(x\)-coordinate of the 3 arc clothoid
◆ Y()
Return \(y\)-coordinate of the arc clothoid as a function of curvilinear coordinate
◆ y_begin()
|
inline |
Return initial \(y\)-coordinate of the 3 arc clothoid
◆ y_end()
|
inline |
Return final \(y\)-coordinate of the 3 arc clothoid
Friends And Related Symbol Documentation
◆ operator<<
|
friend |
Print on strem the ClothoidCurve object
- Parameters
-
stream the output stream c an instance of ClothoidCurveobject
- Returns
- the output stream
The documentation for this class was generated from the following files:
- /Users/enrico/Ricerca/develop/PINS/pins-mechatronix/LibSources/submodules/Clothoids/src/Clothoids/ClothoidList.hxx
- /Users/enrico/Ricerca/develop/PINS/pins-mechatronix/LibSources/submodules/Clothoids/src/ClothoidG2.cc
- /Users/enrico/Ricerca/develop/PINS/pins-mechatronix/LibSources/submodules/Clothoids/src/ClothoidList.cc
Generated by